

发布时间:2020-11-09
阅读量:1011
1 引言
EDFA模块主要包括两部分:光路模块和电路模块。光路模块的功能是光信号的驱动放大,电路模块则用于对光路模块中泵源980nm激光器进行测控,使EDFA整机按预定预置的各项指标长期稳定、可靠的工作。本文设计了一种高精度、宽范围的温控电路。
2 980nmLD组件特性
2.1 980nmLD组件
980nmLD载体器件安装在半导体制冷器上,通过改变流过制冷器的电流方向(决定致冷或加热)和大小,调节载体的温度。载体上安装有热敏电阻 RT为温度传感器。
2.2 980nmLD的热传导模型
若流入(出)载体的热量速率为q , 载体向周围散发(吸收)的热量速率为qs ,根据热力学定律有如下关系:
Cdθ/dt=q-qs (1)
式中,C是载体的热容量。载体温度 θ的大小决定于i流过半导体制冷器产生的电功率。因而 q与i为函数关系,且为非线性关系:q = f (i)。 由于最关心的是稳定值(亦工作点Θ 0 ,I0)附近的变化。为此,将函数 q = f (i)进行线性化处理;并考虑到:
qs=θ/R (2)
R是载体向周围传热的热阻;并令: CR=T0,T0是 θ(t)变化的时间常数;kR=K 0,
![]()
则式(1)可写成动态方程:
![]()
这就是流过半导体制冷器的电流I (t)与载体温度q(t)的动态微分方程。若 i(t)象函数为I(s);q (t)的象函数为Q(s),则式(4)可写成传递函数形式:
![]()
显然,这是一个惯性环节。
设热敏电阻RT的热容量为 CT,载体向热敏电阻输出热量的速率为 qT,热阻为RW。在载体温度 θ的作用下,RT的温度θ T由以下方程描述:

用传递函数表示:θ(t) 象函数为Θ(s): θT(t)象函数为Θ T(s)则
![]()
其中,TW=C TRW,这是积分环节。
3 用于温度稳定的(模拟)自调系统
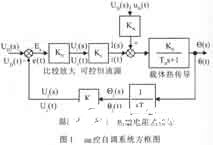
为了使980nmLD稳定在预置(或给定)的温度上,温控系统应设计成自调系统。该系统的调节对象是“制冷器”,输出量是载体温度 θ(t),象函数是Θ(s);输入量,亦给定值以电压形式 uD(t)输入,其象函数为U D(t),则自调节系统方框图如图1所示。以下给出组成方框图各部分的硬件电路,然后对系统的品质和误差进行分析和检测。
3.1 可控恒流源
在图1温控系统中,可控恒流源实质上是执行机构。图2(a)是可控恒流源电原理图。图中:IC1是电流取样负反馈放大器;IC2是误差放大器,;T1 、T2构成电流放大器。
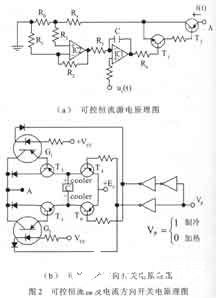
图2(a)是由电流负反馈电路构成的恒流源。输出恒流i(t)流入制冷器。经推导i (t)与输入(控制)电压ui( t)有如下关系:
显然KI为常数。这就是说,恒流源的输出与运放及晶体管参数无关,只与电阻R1、 R2和R0有关。因此,本恒流有很高的稳定性。图2(b)中,由T3~T6构成桥开关。由数字开关信号 Vp(TTL电平)控制恒流源输出电流的方向。
3.2 温度测量反馈电路
由于载体温度与热敏电阻R T的阻值为单值单调对应关系。因此,通过检测装在载体中的热敏电阻 RT的阻值来确定载体温度。图3是常用的温度-电压变换电桥电路。
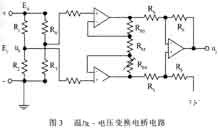
由图可知,电桥输出(uT -u0),再经放大得:

若对应温度q1 、q2、q3的输出定为 u01、 u02 u03,则线性化的条件是u 02=(u03-u01 )/2。为简化,令u01=0,u 02= u03/2,根据R1和 q的对应关系,可选q1=0℃,q 2=25℃,q3=50℃,对应的电阻为: R T1,R T2和R T3,满足三点线性化的方程组:

解方程得:
![]()
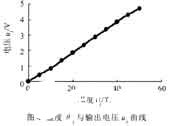
将R T1、R T2、RT3代入上式得:R 0=7.837kΩ,并计算出θj- uj曲线,如图4所示,该曲线在0℃、25℃和50℃三点满足线性化条件,曲线近似成直线,则 Ui(t)=K jqj(t) (8)
Kj为直线斜率,计算得 Kj=94.387mV/℃。
3.3 系统品质分析
由图1,可得输入为给定量象函数U D(s),输出为温度象函数Θ(s ),温度自调节系统的传递函数:
![]()
当给定值不变,或UD (s)=0,扰动电压UN(s ),温度变化ΘN(s),方框图如图5所示。

由图5可得在UN( s)作用下的扰动传递函数:
由图1,当UN(s )=0状态下,得出误差信号e(t)的象函数 E(s):
由式(9)~(11),对系统品质如下分析。 (1)无静差系统
若扰动信号uN( t)=1(t),扰动静差qN (t)可根据终值定理求得:
其中:UN(s )=1/s,引入式 (10),则:
![]()
为无扰动静差。由式 (11),不难求得给定静差。令UD(s )=1/s,则给定静差:
e(t)|=limsxE(s)=0
(2)最佳状态
由式(9)可写出系统的特征方程:
T0s2 +s+KVKI K0Kj/T W =0 (12)
首先判断系统是否稳定。由式(12)可知,方程的各阶系数均大于零,且不缺项,根据代数法稳定判据,系统稳定。
再根据方程的根:
![]()
因图1中的比较放大器KV 是比例放大器(电路图略),改变放大器的比例电阻,亦可改变 KV。改变KV可使系统出现三种状态:欠阻尼状态、过阻尼状态、临界状态,若使4KVK IK0KjT 0/TW 在0附近,则系统进入临界状态,此时上升时间短而又不振荡,为最佳状态。实验表明此时 KV为40~50。
3.4 系统误差分析
上述自调系统的温控精度实测结果是:窄温控范围(15~25℃),长期稳定度±0.2℃;宽温控范围(5~40℃),长期稳定度±0.4℃;显然,这与不超过±0.1℃的技术要求存在差距。
上述自调系统的误差源经开环检测,主要是桥式温度-电压变换电路的电源电压EO的稳定度,电桥输出放大器的零点漂移,其次是可控恒流源的电流漂移。
4 建立微机温度双回路数字测控系统
图1所示的系统是单回路自动控制系统,在此基础上,再加入一个以微机为核心的测控回路,构成双回路数字测控系统,该系统如图6所示。图6 中,PC是单片机,键盘、显示器为人、机界面。温度精测电路可实现比图1的测温电路更精确的温度测量。然后经模/数转换,PC进行数据处理。并依据输出温度与设定温度的偏差,PC经数/模转换给出微调值。这是一个负反馈的过程。
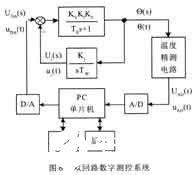
图6所示系统提高温控精度的主要措施有以下几点。
4.1 应用电阻比较法,提高测温精度
将图3电路中的R0、 RT 电桥臂直接用微机进行检测,电原理图如图7所示。

图中:IC1为高阻输入射随器,保证对 R0、RT测量不分流。IC2为差动放大器,可较好地消弱共模噪声电压。IC2放大倍数KC2决定于计算机A/D 转换量程。控制up2 数字信号,分别测量EO,u T,则
![]()
由于uT、E0是直接测量所得。尽管由于 E的变化引起UT、E0 的相应变化,微机(通过A/D转换)仍能准确测量瞬时值。由于测量速度很快,两次测量可认为放大器增益KC2变化极小。因而,通过式(14)可精确计算RT值,且测量精度与 E的变化和KC2的变化无关,只决定于 uT、E0的检测精度和 R0的精度。必须指出的是,这种电阻比较法,只适用于微机测量。这是本文提出的新方法。
4.2 应用数字滤波和零点补偿,有效消弱放大器的零点漂移
为消弱测量UT、 E0的随机误差和放大器的零漂,使测量精度进一步提高,采用数字滤波和零点补偿法。测量数学模型为:
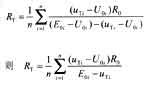
式中:n 为测量次数;E0i、U Ti和U0i分别为第i次测量E0、u T和U0值。U0 为IC1、IC2的零位电压,可以通过模拟开关K使IC1接地进行测量。测量精度可达0.1%,相对温度误差±0.02℃。
4.3 应用单片机进行补偿
在图6所示的数字温控(微调)过程中,单片机是按一定采样周期进行调整的。设UDAS 为给定或要求达到的给定电压值,UDAS (N)为任意第N 个采样周期的UDAS值。同样,设U DA 为实测(或采样)的电压值,UDA (N)为任意第N 个采样周期的UDA值。为了达到精密的测控 [4],微机依据UDA(N )与UDAS(N)的差,通过D/A 转换器给出负反馈特征的调整量,使UDA 向接近UDAS变化,向消除两者之差的方向变化。同时考虑 UDA 随时间的变化速率,还要考虑UDA( N)与其前一周期UDA(N- 1 )的变化。因而总的电压调整增量应为:ΔU=U DAS(N)+UDA(N -1)-2UDA(N)。这就是微机进行微调补偿的数学模型。
通过上述一系列措施,使图6给出的双回路温控系统的温控范围达到10~35℃、温控精度达到±0.03~±0.05℃,满足了宽范围、高精度的要求。
5 结束语
本文所述的温控电路,已成功的应用于EDFA 模块的温度测控。达到了预期要求的宽范围(10~35℃)、高精度(±0.03~±0.05℃)、高可靠性。所有实用化的EDFA产品,经过近5年的现场运行,都未出现任何问题。
 首页
首页 资讯中心
资讯中心